IMX6ULL2025年最新部署方案3在Ubuntu24.04上编译通过Qt6.8.3且部署到IMX6ULL正点原子开发板上.md
前言
笔者需要先说的是,我们的Qt6现在已经全面的转向使用CMake进行构建了。因此,我们Qt本身,也转向了使用CMake构建,下面,笔者简单说一下,我们的正点原子如何移植Qt6.8.3。
本篇教程希望达成如下的期望:
- 在自己的运行现代发行版的上位机上成功编译出可以运行在32位ARM平台(以IMX6ULL为例子)Qt5.12.9的基本运行库
- 部署自己的使用统一Qt版本的Qt基础开发环境,争取做到上位机和下位机可以通过点击鼠标切换kit无缝切换编译目标平台
笔者的最终运行环境为如下的配置
- 下位机:搭载了4.3寸RGB屏幕的IMX6ULL的正点原子Alpha开发板,板间系统的基础环境为笔者编写基础教程的运行环境:Uboot2024.4版本+Linux6.12.3内核+1.36版本的Rootfs,如果你没有做好这个也是无所谓的,作为上层框架的Qt一般而言不会关心于此,但是你必须保证你的板子上的C++运行库环境版本跟你编译Qt的交叉编译器的版本完全一致!(小有差距也无所谓,但是太大不行,ABI差异过大会导致未定义的符号或者GLibc的Version决议失败拒绝链接库)
- 上位机:笔者是一台物理运行Ubuntu24.04操作系统的电脑,上面的编译器环境为arm-linux-gnueabihf-gcc,版本是13.3,其本地gcc也是相同版本的13.3,这个关系没那么大,主要是为了辅助编译qt的。笔者建议,编译主机还是要好一些,笔者的小主机只有四个核,编译qt编译了小一天才完事。
需要说明的是,因为这个是笔者自己琢磨的,没有任何参考,陪伴我的只有Qt Cross Compile文档和NXP移植自己原生QT的一些配置,因此显然不是最好的。这个,需要你自己根据自己的需求进行推演和设置参数。废话少说我们开始!
TSLib触控屏的编译
tslib是负责了我们跟LCD驱动屏幕底层的触碰的交互。这个库的地址在
https://github.com/libts/tslib
笔者直接下载了最新的ts1.23,请你解压后,进入这个目录:
➜ pwd
/home/charliechen/imx6ull/qt_compile/tslib
➜ ls
acinclude.m4 ChangeLog config.h configure etc m4 NEWS stamp-h1 tslib.pc.in
aclocal.m4 cmake config.h.in configure.ac INSTALL Makefile plugins tests
arm-linux.cache CMakeLists.txt config.log COPYING install-sh Makefile.am README THANKS
AUTHORS compile config.status depcomp libtool Makefile.in README.md tools
autogen.sh config.guess config.sub doc ltmain.sh missing src tslib.pc
笔者打算将我们所有的构建成果单独放到一个build文件夹下,比如说我们的
/home/charliechen/imx6ull/qt_compile/tslib_res
我们所以在项目的根目录下写下我们的参数
./configure --host=arm-linux-gnueabihf ac_cv_func_malloc_0_nonnull=yes --cache-file=arm-linux.
cache -prefix=/home/charliechen/imx6ull/qt_compile/tslib_res
笔者说一下这些参数在作什么:
./configure是标准的 GNU 配置脚本入口,表示开始配置当前源代码包的编译环境。
--host=arm-linux-gnueabihf告诉配置系统目标平台是 ARM 架构的 Linux 系统,并且使用的是硬浮点 ABI,这表明这是一个交叉编译过程,不是为本机编译。
ac_cv_func_malloc_0_nonnull=yes是直接向配置脚本声明某个自动检测变量的值,这里指定malloc(0)不会返回空指针,用于跳过自动检查,避免误判影响构建。
--cache-file=arm-linux.cache告诉配置系统使用并保存中间检测结果到名为arm-linux.cache的缓存文件中,下次配置可以加快速度或保持一致性。
-prefix=/home/charliechen/imx6ull/qt_compile/tslib_res是安装路径的指定,表示make install后会把生成的头文件、库文件等内容安装到该目录,供后续使用,比如被 Qt 检测到并链接进去。这条配置命令主要用于准备好为 i.MX6ULL 平台编译 tslib 的环境,供 Qt 编译阶段使用。
大概如此,配置结束后
make && make install
一气呵成,很快我们的项目就能编译和下载结束
我们的/home/charliechen/imx6ull/qt_compile/tslib_res就是我们之后让Qt跟我们交互的一个重要的根基,请各位朋友注意,这个文件夹下的所有内容,我们稍后就要准备打包放到我们的根文件系统里去了
上位机Qt环境部署
是的,我们的新Qt编译部署,需要上位机有相同的环境,注意,这里的Qt版本必须一一**对应,一个小数点都不能差!一!个!都!不!行!**比如说,我们这里需要编译的是Qt6.8.3的代码,那就必须下载Qt6.8.3的上位机的Qt环境
关于这个,额外的扩展跟你下位机打算部署的完全一致即可,没啥其他需求。下载结束后,注意,一个路径是你需要记住的,这就是我们的Qt的工具链的位置,也就是我们后面提到的Qt Host Path了,一般而言,他在:
Qt的安装目录/Qt的版本号/下载的编译器套件/
举个例子,笔者是安装在了home目录下,然后是6.8.3,下载的编译器套件是gcc_64,因此:
➜ pwd
/home/charliechen/Qt/6.8.3/gcc_64
➜ ls
bin include libexec mkspecs phrasebooks qml translations
doc lib metatypes modules plugins sbom
总而言之,看到这个就对了!
编译Qt
这个最艰难,笔者被搞了一整天。好在我们现在使用的是现代Qt,只需要我们配置正确了,啥也不用改代码,直接梭哈编译就好了。
第0件事情:选好自己的build地点,之后这个文件夹就不可以改动了,改动一点,就会出现之后写工程无法编译的毛病!除非你重新编译你的代码!
第0.5件事情就是下载Qt6.8.3的源码,这里就不直接给出链接了,downloadqt.io网站上自己找
然后是我们的第一件事情:复制一份device配置进行修改
我们的第一件事情,是复制一份自己的device配置进行识别,我们的板子是IMX6ULL的,修改的基准参考在qtbase/mkspecs/devices下的linux-imx6-g++,为什么是它呢?因为这个配置就是给我们的板子的!但是不能直接使用,因为我们打算使用原生的linux framebuffer,因此需要做这些更改:
- 拷贝一份linux-imx6-g++文件夹,到一个自己的
qtbase/mkspecs/devices/linux-my-g++下,这个linux-my-g++随意,后面的参数随之更改即可。修改里面的qmake.conf文件为:
include(../common/linux_device_pre.conf)
MAKEFILE_GENERATOR = UNIX
CONFIG += incremental
QMAKE_INCREMENTAL_STYLE = sublib
# 添加QT_QPA_DEFAULT_PLATFORM,制定为linuxfb
QT_QPA_DEFAULT_PLATFORM = linuxfb
# 设置我们的cmake编译的flags
QMAKE_CFLAGS += -O2 -march=armv7-a -mtune=cortex-a7 -mfpu=neon -mfloat-abi=hard
QMAKE_CXXFLAGS += -O2 -march=armv7-a -mtune=cortex-a7 -mfpu=neon -mfloat-abi=hard
QMAKE_LIBS_EGL =
QMAKE_LIBS_OPENGL_ES2 =
QMAKE_LIBS_OPENVG =
DISTRO_OPTS += hard-float
# 这个我们会在toolchains.cmake中在设置一次
# 工具链设置(视具体情况可放到 .cmake 文件或 toolchain 文件里)
QMAKE_CC = arm-linux-gnueabihf-gcc
QMAKE_CXX = arm-linux-gnueabihf-g++
QMAKE_LINK = arm-linux-gnueabihf-g++
QMAKE_LINK_SHLIB = arm-linux-gnueabihf-g++
QMAKE_AR = arm-linux-gnueabihf-ar cqs
QMAKE_OBJCOPY = arm-linux-gnueabihf-objcopy
QMAKE_NM = arm-linux-gnueabihf-nm -P
QMAKE_STRIP = arm-linux-gnueabihf-strip
include(../common/linux_arm_device_post.conf)
load(qt_config)
到这里就很OK了。我们下一步,就是编写toolchains.cmake
cmake_minimum_required(VERSION 3.18)
include_guard(GLOBAL)
# 设置交叉编译的目标平台和架构
set(CMAKE_SYSTEM_NAME Linux)
set(CMAKE_SYSTEM_PROCESSOR arm)
# 设置目标的 sysroot 目录
set(TARGET_SYSROOT /) # 请根据你的实际路径修改
# 设置交叉编译工具链路径
set(CROSS_COMPILER /usr/bin/arm-linux-gnueabihf-) # 笔者的交叉编译器的路径位置的前缀
set(CMAKE_SYSROOT ${TARGET_SYSROOT})
# 设置交叉编译器
set(CMAKE_C_COMPILER ${CROSS_COMPILER}gcc) # 由此设置GCC和G++
set(CMAKE_CXX_COMPILER ${CROSS_COMPILER}g++) # 由此设置GCC和G++
# 设置架构
set(CMAKE_LIBRARY_ARCHITECTURE arm-linux-gnueabihf)
# 配置编译器和链接器标志
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -O2 -march=armv7-a -mtune=cortex-a7 -mfpu=neon -mfloat-abi=hard -fPIC")
set(CMAKE_CXX_FLAGS "${CMAKE_C_FLAGS}")
# 库路径
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -fPIC -Wl,-rpath-link,${CMAKE_SYSROOT}/lib/${CMAKE_LIBRARY_ARCHITECTURE} -L${CMAKE_SYSROOT}/lib -L${CMAKE_SYSROOT}/usr/lib")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -fPIC -Wl,-rpath-link,${CMAKE_SYSROOT}/lib/${CMAKE_LIBRARY_ARCHITECTURE} -L${CMAKE_SYSROOT}/lib -L${CMAKE_SYSROOT}/usr/lib")
# 包路径
set(ENV{PKG_CONFIG_PATH} ${TARGET_SYSROOT}/usr/lib/pkgconfig:${TARGET_SYSROOT}/usr/lib/${CMAKE_LIBRARY_ARCHITECTURE}/pkgconfig)
set(ENV{PKG_CONFIG_LIBDIR} ${TARGET_SYSROOT}/usr/lib/pkgconfig:${TARGET_SYSROOT}/usr/lib/${CMAKE_LIBRARY_ARCHITECTURE}/pkgconfig)
set(ENV{PKG_CONFIG_SYSROOT_DIR} ${CMAKE_SYSROOT})
# 设置 Qt 编译器标志
# 这些就是给我们的板子的
set(QT_COMPILER_FLAGS "-march=armv7-a -mfpu=neon -mfloat-abi=hard")
set(QT_COMPILER_FLAGS_RELEASE "-O2 -pipe")
set(QT_LINKER_FLAGS "-Wl,-O1 -Wl,--hash-style=gnu -Wl,--as-needed -Wl,-fuse-ld=gold")
# 设置 CMake 的查找路径
set(CMAKE_FIND_ROOT_PATH_MODE_PROGRAM NEVER)
set(CMAKE_FIND_ROOT_PATH_MODE_LIBRARY ONLY)
set(CMAKE_FIND_ROOT_PATH_MODE_INCLUDE ONLY)
set(CMAKE_FIND_ROOT_PATH_MODE_PACKAGE ONLY)
include(CMakeInitializeConfigs)
# 设置每个配置的初始化标志
function(cmake_initialize_per_config_variable _PREFIX _DOCSTRING)
if (_PREFIX MATCHES "CMAKE_(C|CXX|ASM)_FLAGS")
set(CMAKE_${CMAKE_MATCH_1}_FLAGS_INIT "${QT_COMPILER_FLAGS}")
foreach (config DEBUG RELEASE MINSIZEREL RELWITHDEBINFO)
if (DEFINED QT_COMPILER_FLAGS_${config})
set(CMAKE_${CMAKE_MATCH_1}_FLAGS_${config}_INIT "${QT_COMPILER_FLAGS_${config}}")
endif()
endforeach()
endif()
if (_PREFIX MATCHES "CMAKE_(SHARED|MODULE|EXE)_LINKER_FLAGS")
foreach (config SHARED MODULE EXE)
set(CMAKE_${config}_LINKER_FLAGS_INIT "${QT_LINKER_FLAGS}")
endforeach()
endif()
_cmake_initialize_per_config_variable(${ARGV})
endfunction()
cmake_minimum_required(VERSION 3.18)这一行声明了本项目要求 CMake 的最低版本是 3.18,确保在使用过程中不会出现版本过低导致的不兼容问题。include_guard(GLOBAL)用于防止同一个 CMake 文件被多次包含造成重复定义,它在整个 CMake 生命周期中只会生效一次。set(CMAKE_SYSTEM_NAME Linux)表示本项目要为 Linux 系统进行交叉编译。set(CMAKE_SYSTEM_PROCESSOR arm)则说明目标处理器是 ARM 架构。set(TARGET_SYSROOT /)指定了目标系统的根文件系统路径,也就是交叉编译时的 sysroot,实际使用时需要替换为你自己的 sysroot 路径。
set(CROSS_COMPILER /usr/bin/arm-linux-gnueabihf-)这行定义了交叉编译工具链的前缀,后续编译器设置会在此基础上添加gcc和g++来定位工具。set(CMAKE_SYSROOT ${TARGET_SYSROOT})告诉 CMake 使用我们定义的 sysroot 作为交叉编译时的根目录。set(CMAKE_C_COMPILER ${CROSS_COMPILER}gcc)和set(CMAKE_CXX_COMPILER ${CROSS_COMPILER}g++)分别设置了 C 和 C++ 的交叉编译器路径。set(CMAKE_LIBRARY_ARCHITECTURE arm-linux-gnueabihf)指明了库文件所对应的架构,使得 CMake 能正确地查找库路径。set(CMAKE_C_FLAGS "...")设置了 C 编译器的编译选项,包括优化等级、架构、浮点支持、位置无关代码等。set(CMAKE_CXX_FLAGS "${CMAKE_C_FLAGS}")则直接将 C 编译选项应用到 C++,保持一致性。随后又为
CMAKE_C_FLAGS和CMAKE_CXX_FLAGS添加了库路径相关的参数,如 rpath-link 和-L,确保链接时能找到目标系统的库。通过设置ENV{PKG_CONFIG_PATH}、ENV{PKG_CONFIG_LIBDIR}和ENV{PKG_CONFIG_SYSROOT_DIR},明确指定pkg-config工具查找.pc文件的路径和 sysroot,从而让 CMake 能正确识别依赖库的位置。set(QT_COMPILER_FLAGS "...")是定义给 Qt 项目使用的基本编译参数,包括架构、浮点设置等,set(QT_COMPILER_FLAGS_RELEASE "-O2 -pipe")是 Release 模式下额外加入的优化参数,set(QT_LINKER_FLAGS "...")则配置链接器参数,优化链接方式并指定使用 gold 链接器。接下来的四个set(CMAKE_FIND_ROOT_PATH_MODE_...)设置了 CMake 在交叉编译时的查找策略,分别控制是否查找主机系统下的程序、库、头文件和包,设置为 ONLY 或 NEVER 表示仅查找 sysroot 或不查找。include(CMakeInitializeConfigs)是引入内置模块,用于初始化各个编译配置。function(cmake_initialize_per_config_variable _PREFIX _DOCSTRING)是一个函数,用来为不同的构建配置(如 Debug、Release)初始化编译器和链接器参数。如果变量前缀匹配编译器标志,就按配置分别设置初始化值;如果前缀匹配链接器标志,就将 Qt 链接器标志赋值给共享库、模块和可执行程序的链接器标志;最后_cmake_initialize_per_config_variable(${ARGV})保持函数的默认行为不变,只是在执行前加入了自定义设置。这个 CMake 文件整体作用就是为 Qt 项目在 ARM Linux 上进行交叉编译构建一个完整的编译环境配置。
需要注意的是,笔者发现后续的cmake似乎不会生效skip参数,仍然会全部编译,因此,一个快捷的办法就是直接删除子项目的源代码,笔者直接将我们的Qt源代码精简成这样
init-repository.bat qtgrpc qtserialport
_clang-format init-repository.pl qthttpserver qtshadertools
cmake LICENSES qtimageformats qtwebchannel
CMakeLists.txt qt5compat qtlanguageserver qtwebsockets
coin qtbase qtlottie README.md
configure qtcharts qtmqtt README.md.template
configure.bat qtcoap qtmultimedia tests
configure.json qtdeclarative qtpositioning
CONTRIBUTING.md qtgraphs qtserialbus
这些是笔者留下来的。当然你先要编译什么,就留下什么,但是为了完成正点原子的实验,这些都是必须留下来的
下面,我们就准备编写cmake的构建语句了
cmake .. \
-DCMAKE_BUILD_TYPE=Release \
-DQT_HOST_PATH=/home/charliechen/Qt/6.8.3/gcc_64 \ # 这个就是笔者说的host path,制定好!
-DCMAKE_TOOLCHAIN_FILE=/home/charliechen/imx6ull/qt_compile/qt-6/toolchains.cmake \
-DCMAKE_INSTALL_PREFIX=/home/charliechen/imx6ull/qt_compile/qt-6/qt_res \ # 安装的位置,必须慎重选择
-DQT_QMAKE_TARGET_MKSPEC=devices/linux-my-g++ \ # 指定自己的mkspec交叉环境套件
-DQT_NO_OPENGL=ON \
-DOPENGL_INCLUDE_DIR=IGNORE_ME -DOPENGL_gl_LIBRARY=IGNORE_ME \
-DCMAKE_EXE_LINKER_FLAGS="-L/home/charliechen/imx6ull/qt_compile/tslib_res/lib" \
-DQT_FEATURE_opengl=OFF \
-DQT_QPA_DEFAULT_PLATFORM=linuxfb \
-DQT_FEATURE_xcb=OFF \
-DQT_FEATURE_xlib=OFF \
-DFEATURE_qtwebengine_build=OFF \
-DQT_BUILD_TESTS=OFF \
-DQT_BUILD_EXAMPLES=OFF \
-DCMAKE_C_FLAGS="-I/home/charliechen/imx6ull/qt_compile/tslib_res/include -L/home/charliechen/imx6ull/qt_compile/tslib_res/lib" \
-DCMAKE_CXX_FLAGS="-I/home/charliechen/imx6ull/qt_compile/tslib_res/include -L/home/charliechen/imx6ull/qt_compile/tslib_res/lib" \
-DQT_BUILD_SUBMODULE_qt3d=OFF \
-DQT_BUILD_SUBMODULE_qtactiveqt=OFF \
-DQT_BUILD_SUBMODULE_qtandroidextras=OFF \
-DQT_BUILD_SUBMODULE_qtcanvas3d=OFF \
-DQT_BUILD_SUBMODULE_qtconnectivity=OFF \
-DQT_BUILD_SUBMODULE_qtdatavis3d=OFF \
-DQT_BUILD_SUBMODULE_qtdoc=OFF \
-DQT_BUILD_SUBMODULE_qtgamepad=OFF \
-DQT_BUILD_SUBMODULE_qtlocation=OFF \
-DQT_BUILD_SUBMODULE_qtmacextras=OFF \
-DQT_BUILD_SUBMODULE_qtnetworkauth=OFF \
-DQT_BUILD_SUBMODULE_qtpurchasing=OFF \
-DQT_BUILD_SUBMODULE_qtremoteobjects=OFF \
-DQT_BUILD_SUBMODULE_qtscript=OFF \
-DQT_BUILD_SUBMODULE_qtscxml=OFF \
-DQT_BUILD_SUBMODULE_qtsensors=OFF \
-DQT_BUILD_SUBMODULE_qtspeech=OFF \
-DQT_BUILD_SUBMODULE_qtsvg=OFF \
-DQT_BUILD_SUBMODULE_qttools=OFF \
-DQT_BUILD_SUBMODULE_qttranslations=OFF \
-DQT_BUILD_SUBMODULE_qtwayland=OFF \
-DQT_BUILD_SUBMODULE_qtwebengine=OFF \
-DQT_BUILD_SUBMODULE_qtwebview=OFF \
-DQT_BUILD_SUBMODULE_qtwinextras=OFF \
-DQT_BUILD_SUBMODULE_qtx11extras=OFF \
-DQT_BUILD_SUBMODULE_qtxmlpatterns=OFF \
这个文本我们保存成auto.sh,然后赋予权限chmod 755 auto.sh,这样的话方便我们进行cmake语句的调整。下面我解释一下这些CMake语句在作什么:
cmake .. 表示在上级目录中执行 CMake 配置;-DCMAKE_BUILD_TYPE=Release 设置构建类型为 Release,启用编译器优化;-DQT_HOST_PATH=... 指定 Qt 的宿主构建路径,告诉 CMake 使用该目录中的工具和信息完成交叉配置;-DCMAKE_TOOLCHAIN_FILE=... 指定使用前面写好的 toolchain 文件作为交叉编译工具链定义;-DCMAKE_INSTALL_PREFIX=... 设置构建完成后安装的目标路径;-DQT_QMAKE_TARGET_MKSPEC=devices/linux-my-g++ 告诉 Qt 使用特定的 mkspec 文件作为目标平台编译配置;-DQT_NO_OPENGL=ON 表示完全禁用 Qt 的 OpenGL 支持;-DOPENGL_INCLUDE_DIR=IGNORE_ME -DOPENGL_gl_LIBRARY=IGNORE_ME 是为了绕过 Qt 对 OpenGL 库的自动探测机制,强制使其无效;-DCMAKE_EXE_LINKER_FLAGS=... 设置链接器选项,显式加入 tslib 的库路径;-DQT_FEATURE_opengl=OFF 是 Qt 6 新式的功能控制方式,也用于关闭 OpenGL;-DQT_QPA_DEFAULT_PLATFORM=linuxfb 设置默认 QPA 平台为 linuxfb,避免使用需要 X11 的默认设置;-DQT_FEATURE_xcb=OFF 和 -DQT_FEATURE_xlib=OFF 明确关闭对 X11 依赖;-DFEATURE_qtwebengine_build=OFF 关闭体积庞大的 QtWebEngine 构建;-DQT_BUILD_TESTS=OFF 和 -DQT_BUILD_EXAMPLES=OFF 分别关闭构建测试和示例,进一步加快编译过程;-DCMAKE_C_FLAGS=... 和 -DCMAKE_CXX_FLAGS=... 明确加入 tslib 的头文件与库文件路径,用于编译器阶段正确找到 tslib 支持。
后面连续的 -DQT_BUILD_SUBMODULE_...=OFF 是用来关闭不需要的 Qt 模块,例如 Qt3D、ActiveQt、AndroidExtras、Location、WebEngine 等,目的是最小化构建体积,提升构建速度并减少对系统资源和依赖库的要求。整体来看,这个构建配置适用于资源受限、显示系统简单的嵌入式环境,配合 tslib 做触摸输入,linuxfb 做显示输出,是典型的无窗口系统、无 OpenGL、无 X11 的纯帧缓冲 Qt 嵌入式配置方案。
现在,我们准备点火,mkdir build && cd build,然后把自己写的auto.sh脚本拷到build文件夹内,单走一个./auto.sh,注意,你需要观察cmake脚本的输出配置中的gcc和g++使用的是**arm-linux-gnueabihf-gcc和arm-linux-gnueabihf-g++**,凡是出现Check for working CXX compiler: /usr/bin/c++ - skipped和-- Check for working C compiler: /usr/bin/cc - skipped打回去重新配置!不然的话你幸幸苦苦搞半天最后出来的是X86平台的,太郁闷了!
之后,保证自己的CMake可以正常的generate出来makefile之后,你就可以全速的编译了。然后make install下载即可。
放置进入我们的根文件系统
我们把打包的tslib_res和qt_res都打包放到外面的根文件夹系统下,其中我把qt_res改成了arm-qt,笔者也是放置到了我们的/usr/lib下:
arm-qt tslib ... # 还有其他无关的笔者移植的文件,这里跟我们的构建半毛钱关系没有,笔者不展示
如果你没有触控芯片驱动
对于正点原子的板子,历程源码中是有触控芯片的驱动的,我的板子是4.3RGB。你需要首先做好RGB屏幕驱动的移植和触控芯片的移植,对于触控,你需要做的是修改一下设备树(按照正点原子的即可,对于Linux6.12.3用的设备树还是在那些地方上加,没有变动)和编译对应芯片的驱动即可,在我们使用qt之前,触控芯片的驱动必须加载好,不然没有办法交互的!
提示,你可以先行运行一下在开发板上ts_test,看看自己的驱动有没有问题,能不能正常的进行触摸
修改我们的/etc/profile,加载一些预定义的变量
➜ cat profile
# TSLib
export TSLIB_ROOT=/usr/lib/tslib
export TSLIB_CONSOLEDEVICE=none
export TSLIB_FBDEVICE=/dev/fb0
export TSLIB_TSDEVICE=/dev/input/event1 # 注意,要指向你自己的触控屏监听事件,最简单的检测办法就是挂载和卸载自己的lcd触摸驱动看看哪一个event消失了,再不济,cat /proc/bus/input/devices看看哪一个是自己的触摸屏
export TSLIB_CONFFILE=$TSLIB_ROOT/etc/ts.conf
export TSLIB_PLUGINDIR=$TSLIB_ROOT/lib/ts
export TSLIB_CALIBFILE=/etc/pointercal
export LD_PRELOAD=$TSLIB_ROOT/lib/libts.so
# Qt
export QT_ROOT=/usr/lib/arm-qt
export QT_QPA_GENERIC_PLUGINS=tslib:/dev/input/event1
export QT_QPA_FONTDIR=/usr/share/fonts
export QT_QPA_PLATFORM_PLUGIN_PATH=$QT_ROOT/plugins
export QT_QPA_PLATFORM=linuxfb:tty=/dev/fb0
export QT_PLUGIN_PATH=$QT_ROOT/plugins
export LD_LIBRARY_PATH=$QT_ROOT/lib:$QT_ROOT/plugins/platforms
export QML2_IMPORT_PATH=$QT_ROOT/qml
export QT_QPA_FB_TSLIB=1
export QT_QPA_FONTDIR=/usr/share/fonts
# load neccessary modules
insmod /lib/modules/gt9147.ko # 笔者的触控芯片驱动,直接使用正点原子编译的即可
TSLib 部分首先设置了环境变量来告知 tslib 使用的资源位置,其中 TSLIB_ROOT=/usr/lib/tslib 是 tslib 安装的根目录,其下应包含配置文件、插件、库等资源。TSLIB_CONSOLEDEVICE=none 禁用 tslib 对控制台设备的交互,适合在纯 framebuffer 环境下使用。TSLIB_FBDEVICE=/dev/fb0 和 TSLIB_TSDEVICE=/dev/input/event1 分别指定 framebuffer 和触摸输入设备,通常 event1 是电容屏的输入节点。TSLIB_CONFFILE 指定配置文件路径,通常位于 $TSLIB_ROOT/etc/ts.conf,其中定义了滤波器和插件顺序。TSLIB_PLUGINDIR 告知 tslib 插件的存放路径,插件负责不同类型触摸屏的处理方式。TSLIB_CALIBFILE=/etc/pointercal 是 tslib 保存校准数据的位置,校准后生成的 pointercal 文件将在启动时被读取。LD_PRELOAD=$TSLIB_ROOT/lib/libts.so 表示在运行 Qt 应用时强制优先加载 tslib 的共享库,使得其对触摸事件的处理生效,即便 Qt 没有编译进对 tslib 的显式支持。
Qt 部分的环境变量用于告知 Qt 运行时如何加载平台插件和配置触摸输入。QT_ROOT=/usr/lib/arm-qt 是 Qt 安装路径,其中应包含 bin、lib、plugins、qml 等子目录。QT_QPA_GENERIC_PLUGINS=tslib:/dev/input/event1 告知 Qt 加载 tslib 插件并绑定到指定输入设备,以便进行触摸事件解析。QT_QPA_FONTDIR=/usr/share/fonts 两次定义确保 Qt 能找到系统字体,否则中文或部分图形界面组件可能无法正常显示。QT_QPA_PLATFORM_PLUGIN_PATH 和 QT_PLUGIN_PATH 都指向 Qt 插件路径,确保 Qt 能加载 linuxfb 和其他必要插件。QT_QPA_PLATFORM=linuxfb:tty=/dev/fb0 显式指定 Qt 使用 framebuffer 作为绘图平台,并绑定到 /dev/fb0,适用于无 X11/Wayland 的嵌入式平台。LD_LIBRARY_PATH 扩展了动态库搜索路径,包含 Qt 库目录和平台插件目录,确保应用运行时能找到所需 .so 文件。QML2_IMPORT_PATH 设置 QML 模块查找路径,若使用 QML 组件时可自动找到对应资源。QT_QPA_FB_TSLIB=1 是 Qt 特有环境变量,启用对 tslib 的自动集成,使 Qt GUI 输入能被 tslib 接管。
最后 insmod /lib/modules/gt9147.ko 是加载电容触摸屏控制芯片 GT9147 的内核模块,这个模块提供 /dev/input/event1 节点,是 tslib 的输入源,通常正点原子的驱动即可兼容使用,只需保证内核版本匹配即可。
搬运字体
笔者对中文字体没啥需求,因此,直接复制我们Ubuntu的/usr/share/fonts/ttf下的文件即可。
部署我们的上位机开发
跟Qt5类似,我们需要注意的是,安装目录非常重要,必须保留,一个少不了,不然的话Qt找不到安装信息死活不给编译(缺少生成内容),因此,你需要做的是打开QtCreator,一样,
先设置Qt的版本信息,注意,必须指向qmake文件。
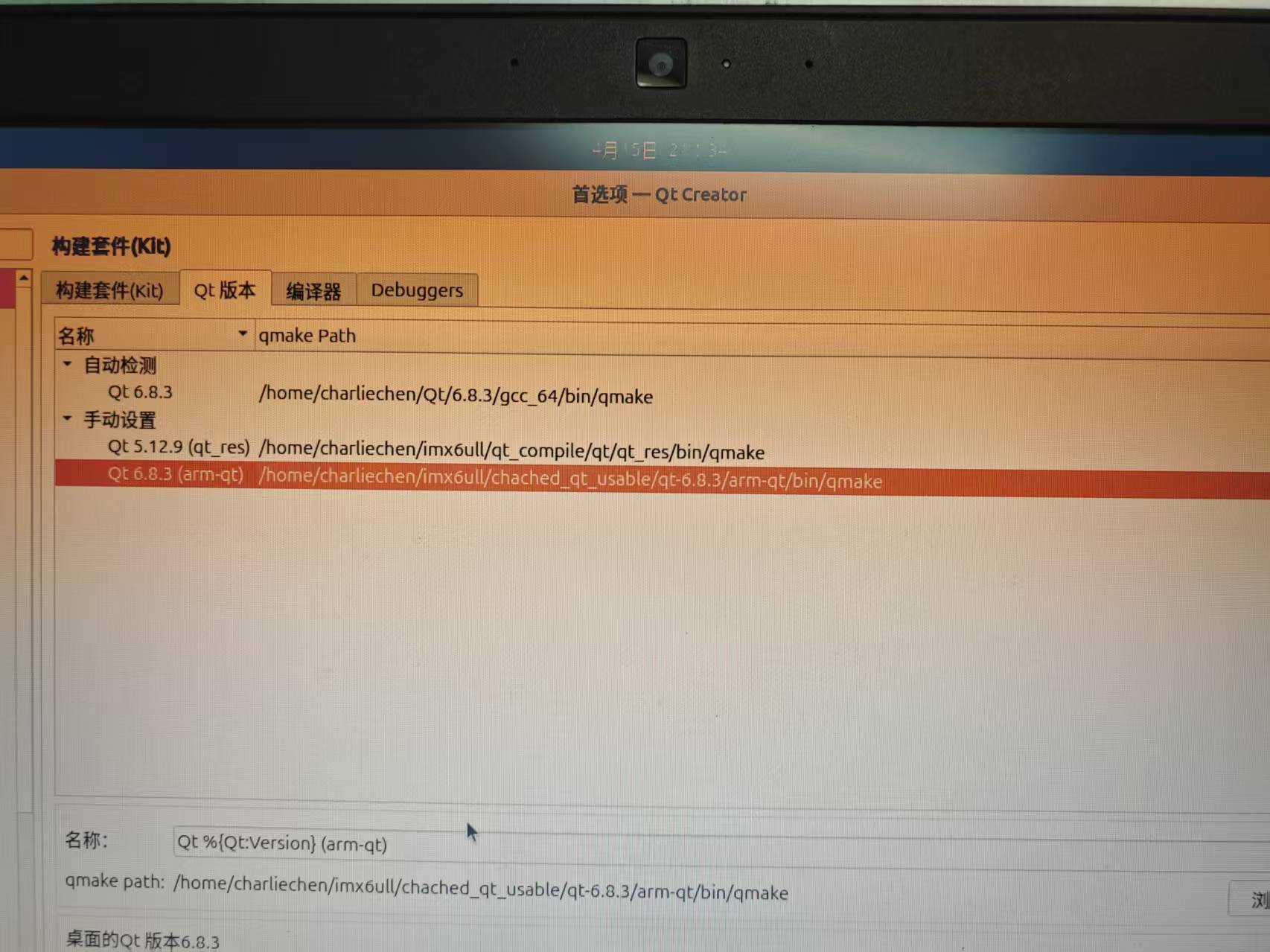
我们设置一个新的Kits为:
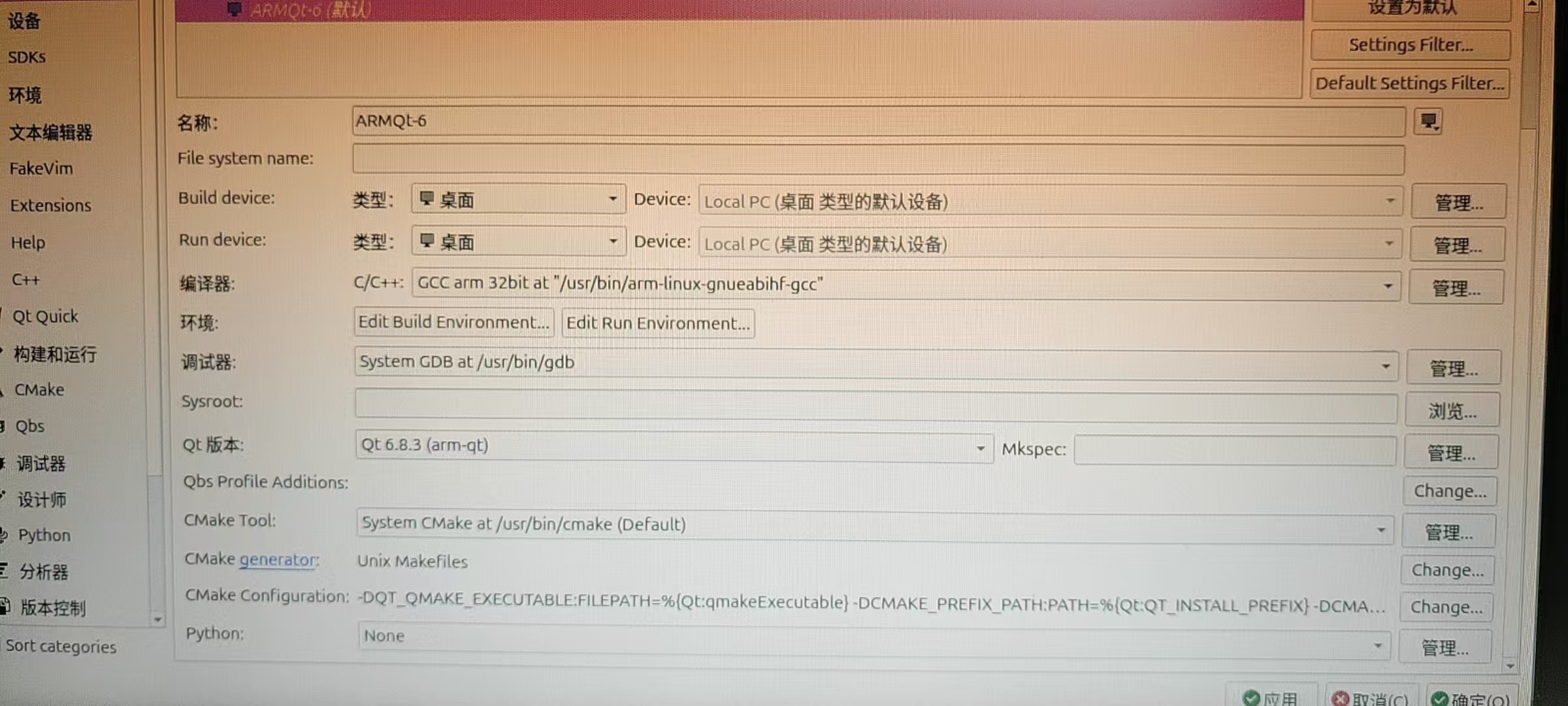
这里需要注意的是,笔者没有配置gdb,因为这个是需要远程调试的,笔者仍然决定是上位机先写好在上位机上运行后,放到板子上再跑,不然的话太麻烦了。
现在我们随意的写一点工程,编译一下,然后把编译得到的可执行文件复制到开发板上,这个时候,我们就能高高兴兴的得到我们的运行结果了!
笔者随意写的demo:
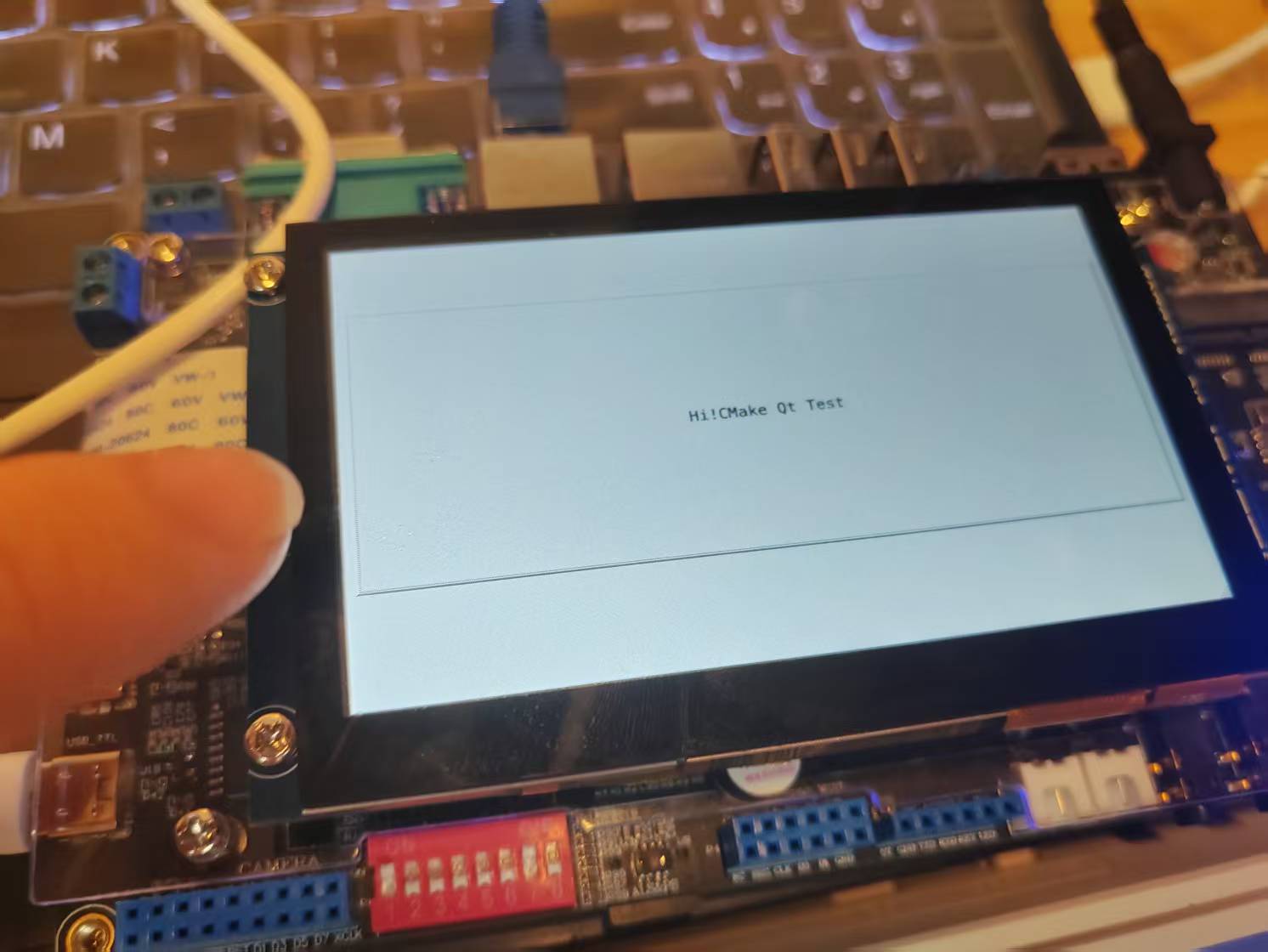
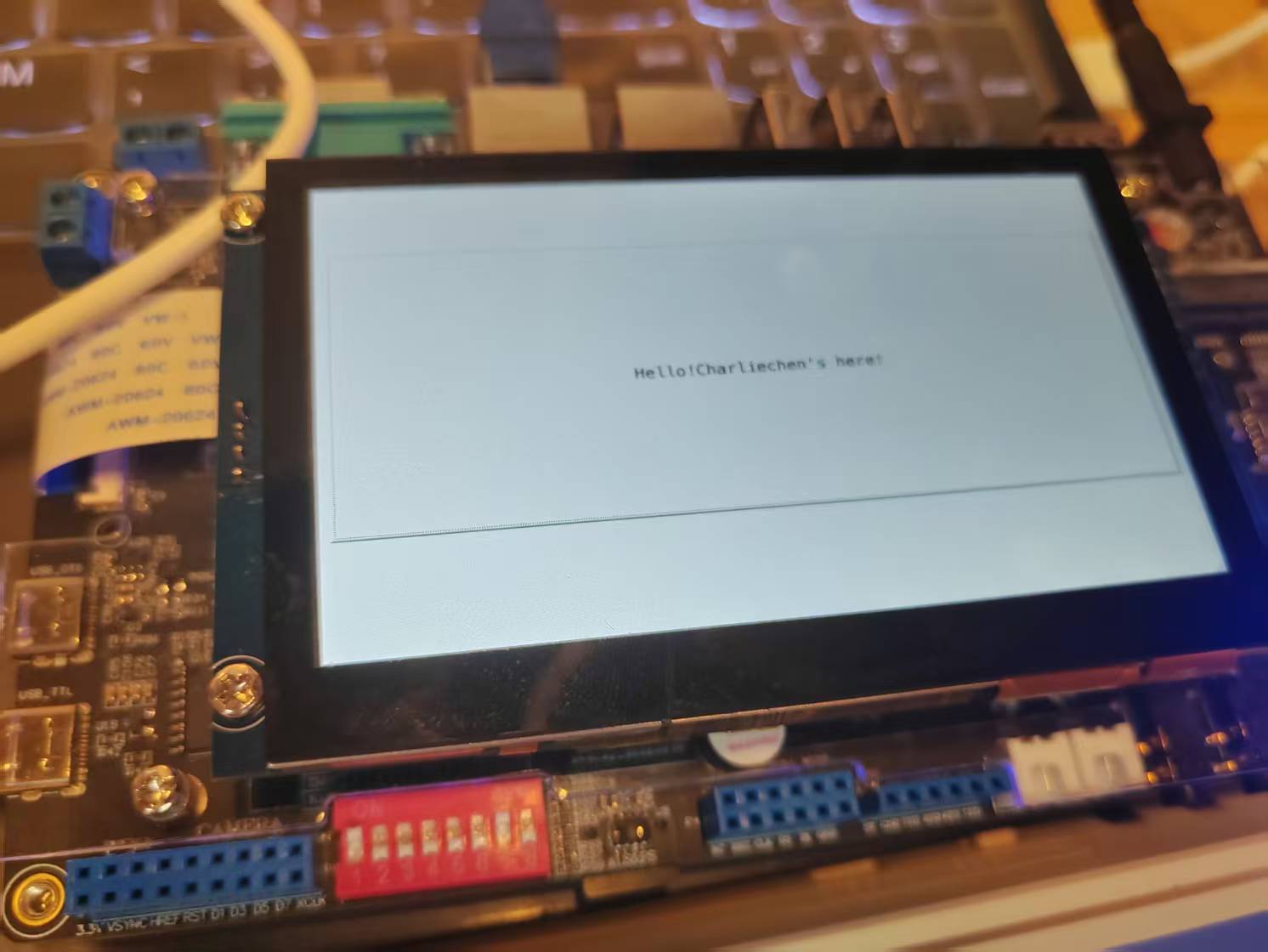
成功的朋友就会发现,Qt6远比我们的Qt5丝滑!这就是Qt6的优化!